In This text we will show what would be the keys of an ecological restoration based on the technology of the drones, from the mapping of the Territory, through the subsequent analysis, to the planting of native seeds with drones.
Step 1: Mapping the Territory.
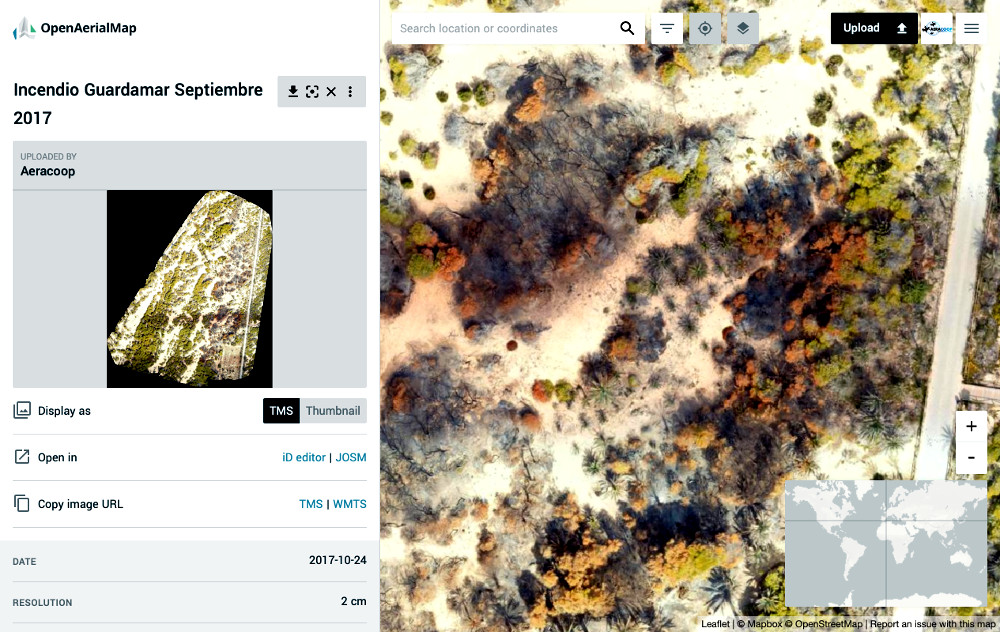
After a fire, or to recover a degraded area, the first step would be to perform a damage assessment and document the current state before any intervention.
For This task The drones are a fundamental tool because they document faithfully the state of the Territory. To perform these tasks we can use a conventional camera, or cameras that capture the near infrared and thus be able to see the photosynthetic activity of the plants. The more infrared light reflected, the plants will be healthier.
DePending on the amount of terrain affected, we could use multirotors, which can have a mapping capacity of about 15 hectares per flight, or opt for a fixed wing, which could map up to 200 hectares in a single flight.
The resolution to choose depends on what we want to observe. To perform a first evaluation, with resolutions of 2 to 5 cm per pixel would be sufficient. For further evaluations, when looking to check the evolution of seed sown in an area, it may be advisable to perform samplings with resolutions around 1 CM/pixel to see the buds.

Flight to 23 meters to get 1cm/pixel 
Flight at 70 meters to obtain a resolution at 3 cm/pixel
To make the Orthophoto and digital model of the terrain, we can use free tools like PrecissionMapper or OpenDroneMap that is also Free Software, or more advanced tools like Pix4Dmapper.
Step 2: Analysis and classification of the Territory
When we have rebuilt the orthophoto, this image, usually in geoTIFF format, contains the geographical coordinates of each pixel, so any recognizable object in the image has associated its 2D, latitude and longitude coordinates in the real world.

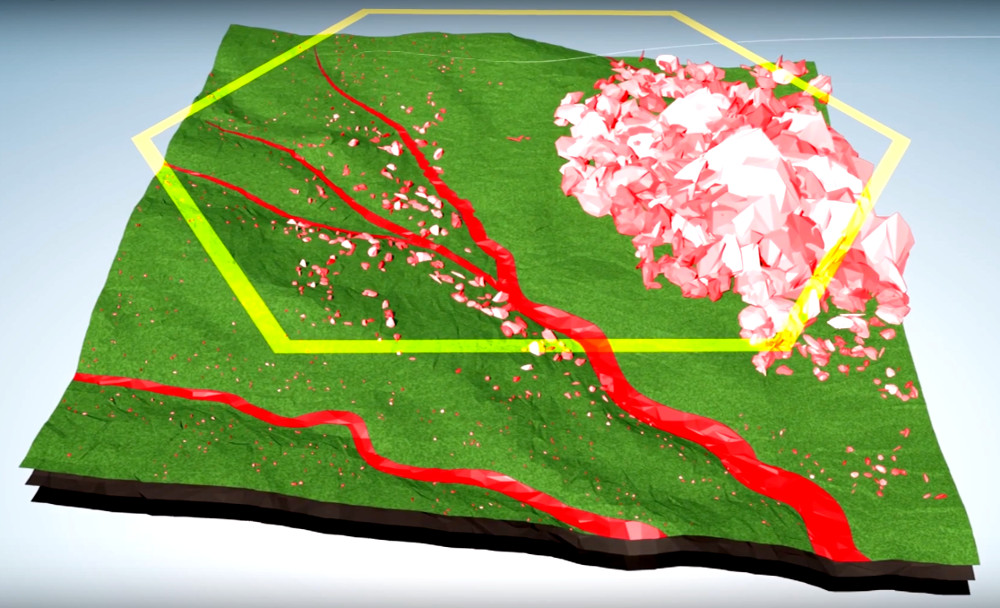
Ideally, to understand the territory, we should also work with 3D data and analyze its elevation characteristics, with the aim of locating the ideal places to sow. 3D models can be:
Level Curves (Shapefile)
The ESRI Shapefile (SHP) format is a proprietary computer file format for spatial data, developed by the ESRI company. Contour lines are familiar in the representation of surfaces on the maps. An Outline is a line with all contiguous points with equal height. Contours are delivered as a polyline ESRI Shapefile, with a range of previously established heights.

3D Model (OBJ)
It Is a universally accepted file format. This format represents the UV position of each vertex of texture coordinates, the normal vertices and faces that make each polygon defined as a list of vertices, and texture vertices, representing 3D geometry.

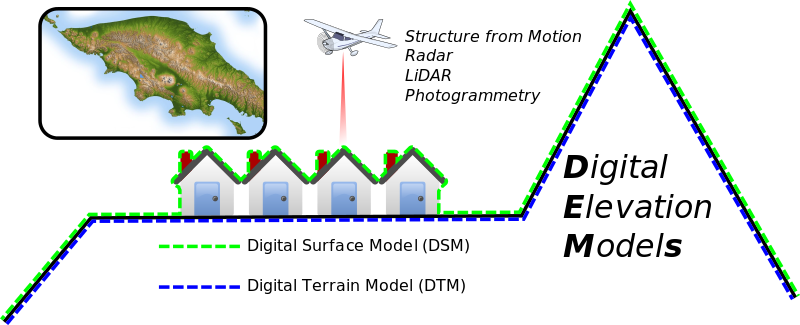
Digital Terrain Model
The Digital Terrain Model (MDT) is one in which the variable represented is the level of the terrain in relation to a specific reference system. In most cases, the term Digital Surface Model refers to the surface of the Earth and includes all the objects that it contains. On the other hand a MDT represents the surface of bare soil without obstacles, neither vegetation, nor buildings.
Point Cloud
The file format is a public file format developed in response to the growing number of LIDAR proprietary file formats. Although It was primarily developed for the exchange of LIDAR Point cloud data, storing light and range Detection data, collected by optical remote sensors, this format supports the exchange of any tuplet x, y, z-dimensional. An excellent opensource multiplatform editor of Cloud of points is MeshLab.

DXF Model
DXF (Drawing Exchange Format) is a CAD data file format, developed for the first time by Autodesk, with the purpose of data interoperability with AutoCAD, which used DWG, and other programs. This format will allow the use of 3D data in CAD software.
Tile Set
It Is A KML file, that refers to PNG mosaics, that facilitate the import in applications like Google Earth and Google Maps.
For its part, OpenDroneMap can produce the following results:
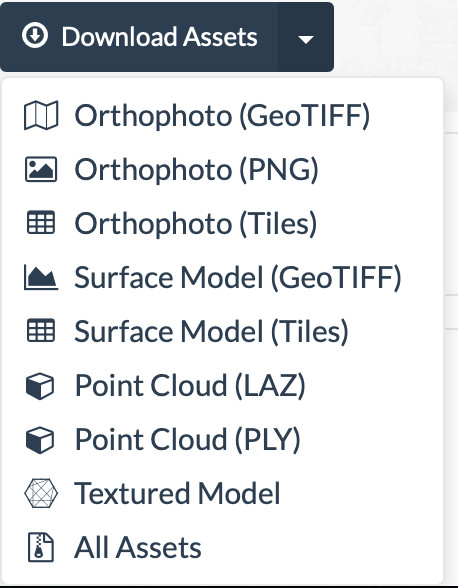
What format to choose? It will Depend On the software we are going to use, and the information we need. To build the automation software that concerns us, optaríamos by a Tileset, if we are going to develop an Artificial Intelligence software for image processing, because we could work with smaller images, because the complete image It would be very heavy. But If we are going to use a free Geographic Information System like QSIG, we could use a single image as geoTIFF.
Surface Classification and segmentation
The area to be reforested, the density and type of species will be determined by a Biologist, Ecologist, Forestry Engineer, or professional of the restoration, and also by legal or political questions. As approximate value, we can point to 50,000 seeds per hectare, this would be 5 seeds per square metre. This surface to be sown will be circumscribed within the previously mapped area.
Once determined in general traits, the area to be reforested, the first necessary classification would be to differentiate the potential area to be sown, of which no. This algorithm should identify as NON-sowing zones:
- Infrastructures: Roads, constructions, roads.
- Water: Rivers, lakes, flooded areas.
- Non-fertile Surfaces: rocky areas, or with large stones.
- Land with a slope greater than 35%
So this first step would be to make the segmentation of the territory itself or NOT, which would produce the areas or polygons that IF they could be sown.
Until Here we could make a sowing of filling on these areas, producing a vegetation cover, avoid erosion and begin as soon as possible with the recovery of the soil. Although There will be cases in which either for the price, difficult to obtain, type of seed, or by the difficult characteristics of the ecosystem, it would be advisable to carry out a deeper analysis of the relief, which takes into account a map of shadows to evaluate the light, enclaves Where you can retain moisture, wind coats, etc.
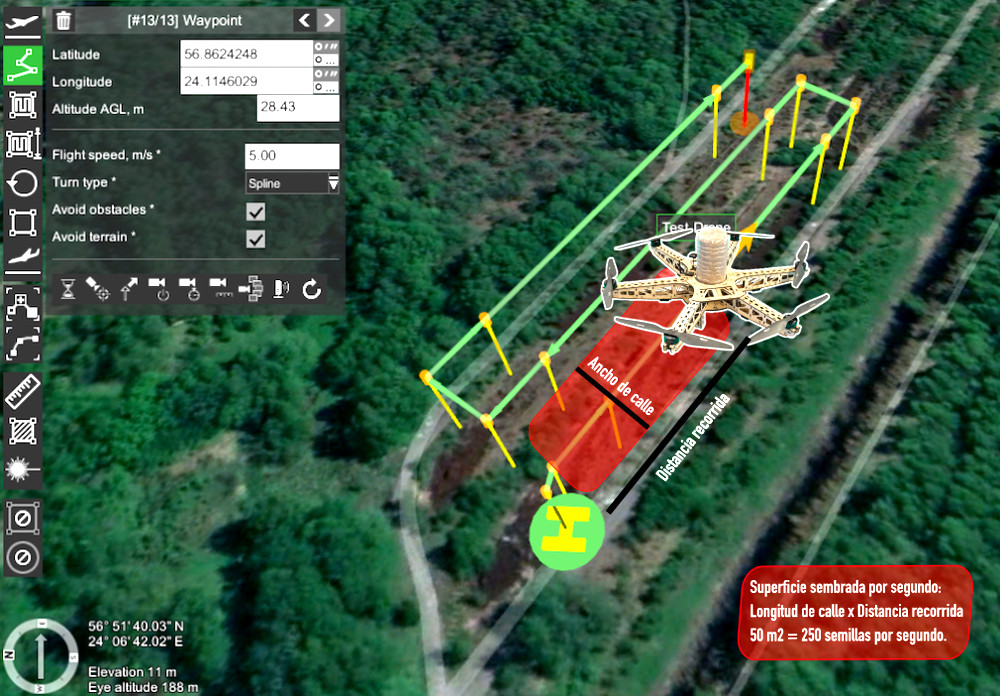
STEP3: Planting with drones
Once We have constructed these polygons where to sow, to make a complete filling of the surface with seeds, we should know the sowing width that can open the Seeder drone, and the height of flight established, to make a complete tour Of the territory with a separation between streets of this known width. The speed will also determine the number of seeds per square metre, but we will try to maximize the speed, to minimize the flight time and to carry out the sowing operation per hectare in the minimum possible time. Assuming that we fly at 20 km/hour this would be about 5 meters per second, if we have a street width of 10 meters, in a second would cover a surface of 50 meters, so we should throw 250 seeds per second to cover the target raised 5 seeds per MetR or squared.
So This introduction, if you know artificial intelligence and want to help us, we are looking for students or engineers who want to collaborate in the development of this software. Please Contact us if you have ideas or you can contribute something. Thank you!

_and_Digital_Terrain_Models_(DTM)_when_talking_about_Digital_Elevation_models_(DEM).svg){kind=link}
Trackbacks/Pingbacks