En este texto vamos a mostrar cuales serían las claves de una restauración ecológica basada la tecnología de los drones, desde el mapping del territorio, pasando por el posterior análisis, hasta la siembra de semillas nativas con drones.
Paso 1: Mapeo del territorio.
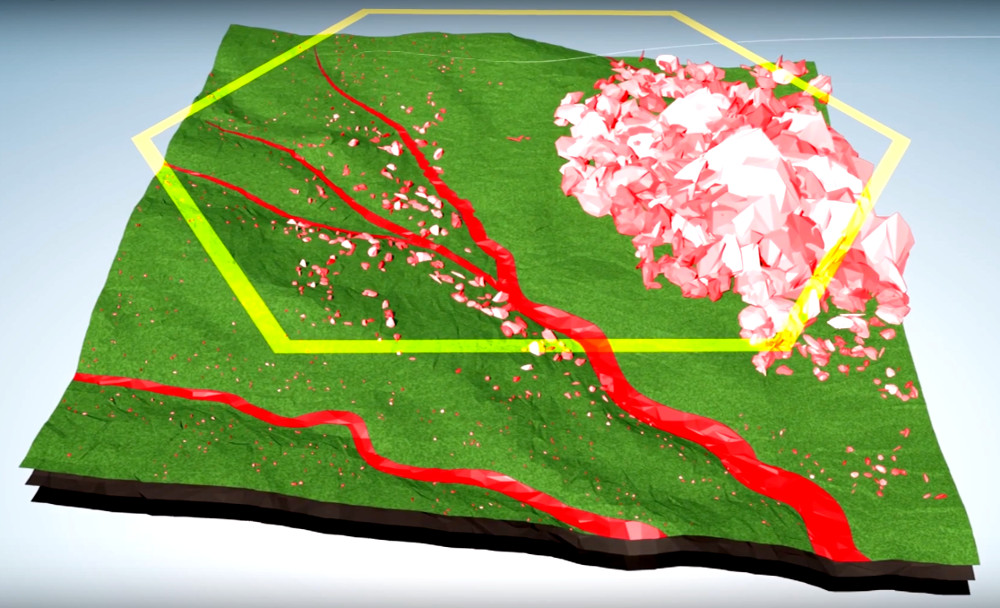
Después de un incendio, o para recuperar una zona degradada, el primer paso sería realizar una evaluación de los daños y documentar el estado actual antes de cualquier intervención.
Para esta tarea los drones son una herramienta fundamental ya que documentan fielmente el estado del territorio. Para realizar estas tareas podemos utilizar una cámara convencional, o bien cámaras que capturen el infrarrojo cercano y así poder ver la actividad fotosintética de las plantas. A mayor luz infrarroja reflejada, las plantas se encontrarán más sanas.
Dependiendo de la cantidad de terreno afectado, podríamos utilizar multirotores, que pueden tener una capacidad de mapeo de unas 15 hectáreas por vuelo, o bien optar por una ala fija, que podría mapear hasta 200 hectáreas en un único vuelo.
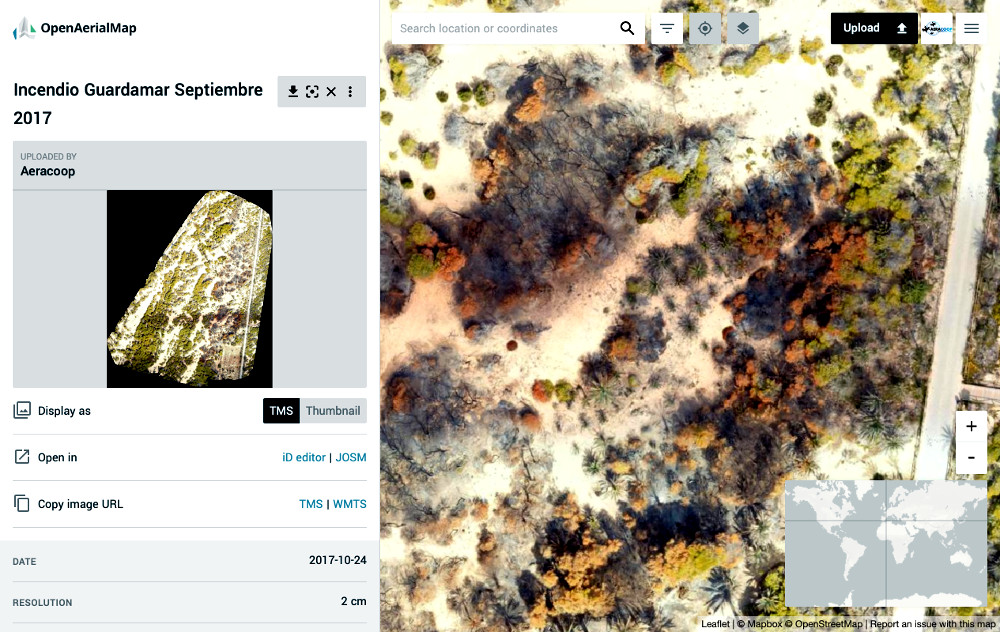
La resolución a elegir dependerá de lo que queramos observar. Para realizar una primera evaluación, con resoluciones de 2 a 5 cm por píxel sería suficiente. Para posteriores evaluaciones, cuando busquemos comprobar la evolución de las semillas sembradas en una zona, puede ser conveniente realizar muestreos con resoluciones en torno a 1 cm/pixel para ver los brotes.

Vuelo a 23 metros para conseguir 1cm / pixel 
Vuelo a 70 metros para obtener una resolución a 3 cm/ pixel
Para realizar la ortofoto y modelo digital del terreno, podemos utilizar herramientas gratuitas como PrecissionMapper o OpenDroneMap que ademas es Software Libre.
Paso 2: Análisis y clasificación del territorio
Cuando ya hayamos reconstruido la ortofoto, esta imagen, normalmente en formato GeoTIFF, contiene las coordenadas geográficas de cada píxel, por lo que cualquier objeto reconocible en la imagen lleva asociadas sus coordenadas 2D, latitud y longitud en el mundo real.

Idealmente, para entender el territorio, deberíamos trabajar también con datos 3D y analizar sus características de elevación, con el objetivo de localizar los lugares ideales donde sembrar. Los modelos 3D pueden ser:
Curvas de nivel (Shapefile)
El formato ESRI Shapefile (SHP) es un formato de archivo informático propietario de datos espaciales, desarrollado por la compañía ESRI. Las líneas de contorno son familiares en la representación de superficies en los mapas. Un contorno es una línea con todos los puntos contiguos con igual altura. Los contornos se entregan como un shapefile ESRI de polilínea, con un intervalo de alturas establecidas previamente.

Modelo 3D (OBJ)
Es un formato de archivo universalmente aceptado. Este formato representa la posición UV de cada vértice de coordenadas de textura, los vértices normales y las caras que hacen que cada polígono se defina como una lista de vértices, y los vértices de textura, representando la geometría 3D.

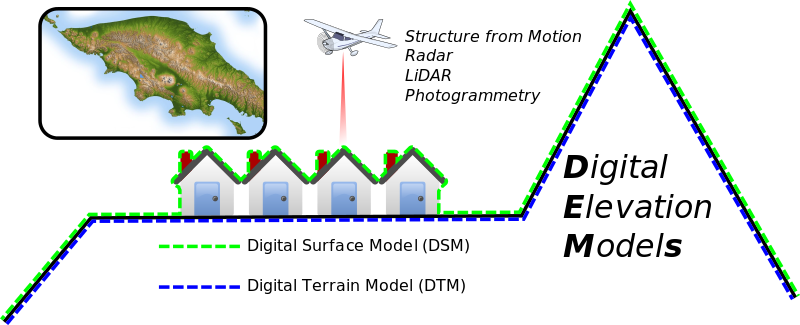
Modelo Digital del Terreno
El Modelo Digital del Terreno (MDT) es aquel en el que la variable representada es la cota del terreno en relación a un sistema de referencia concreto. En la mayoría de los casos, el término Modelo Digital de Superficie se refiere a la superficie de la tierra e incluye todos los objetos que esta contiene. En cambio un MDT representa la superficie de suelo desnudo sin obstáculos, ni vegetación, ni edificios.
Nube de puntos
El formato de archivo LAS es un formato de archivo público desarrollado en respuesta al creciente número de formatos de archivo propietarios LIDAR. Aunque se desarrolló principalmente para el intercambio de datos de nube de puntos LIDAR, almacenando los datos de Detección de luz y rango, recolectados por sensores remotos ópticos, este formato admite el intercambio de cualquier tuplet x, y, z tridimensional. Un excelente editor opensource multiplataforma de nube de puntos es MeshLab.

Modelo DXF
DXF (Drawing Exchange Format) es un formato de archivo de datos CAD, desarrollado por primera vez por Autodesk, con el propósito de interoperabilidad de datos con AutoCAD, que utilizaba DWG, y otros programas. Este formato permitirá el uso de datos 3D en software CAD.
Set de Teselas o Tiles
Es un archivo KML, que hace referencia a mosaicos PNG, que facilitan la importación en aplicaciones como Google Earth y Google Maps.
Por su parte, OpenDroneMap puede producir los siguientes resultados:
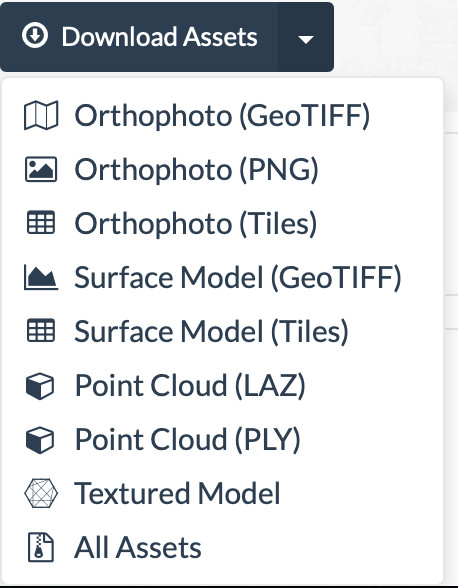
¿Qué formato elegir? Dependerá del software que vayamos a utilizar, y de la información que necesitemos. Para construir el software de automatización que nos ocupa, optaríamos por un Tileset, si vamos a desarrollar un software de Inteligencia Artificial para el procesado de imágenes, ya que podríamos trabajar con imágenes más pequeñas, debido a que la imagen completa resultaría muy pesada. Pero si vamos a utilizar un Sistema de Información Geográfica libre como QSIG, podríamos utilizar una única imagen como GeoTIFF.
Clasificación y segmentación de la superficie
El área a reforestar, la densidad y tipo de especies será determinada por un Biólogo, Ecólogo, Ingeniero Forestal, o profesional de la restauración, y también por cuestiones legales o políticas. Como valor aproximado, podemos apuntar hacia 50.000 semillas por hectárea, esto serían 5 semillas por metro cuadrado. Esta superficie a sembrar, estará circunscrita dentro del área mapeada previamente.
Una vez esté determinada en rasgos generales, el área a reforestar, la primera clasificación necesaria seria diferenciar el área potencial a ser sembrada, de la que no. Este algoritmo debería identificar como zonas de NO siembra:
- Infraestructuras: caminos, construcciones, carreteras.
- Agua: rios, lagos, zonas inundables.
- Superficies no fértiles: zonas rocosas, o con grandes piedras.
- Terrenos con una inclinación mayor al 35%
De manera que este primer paso sería realizar la segmentación del territorio en SI o NO, que produciría las áreas o polígonos que SI podrían sembrarse.
Hasta aquí podríamos realizar una siembra de relleno sobre estas áreas, produciendo una cubierta vegetal, evitar la erosión y comenzar lo antes posible con la recuperación del suelo. Aunque existirán casos en los que o bien por el precio, difícil obtención, tipo de semilla, o por las difíciles características del ecosistema, convendría realizar un análisis más profundo del relieve, que tenga en cuenta un mapa de sombras para evaluar la luz, enclaves donde se puede retener la humedad, abrigos de viento, etc.
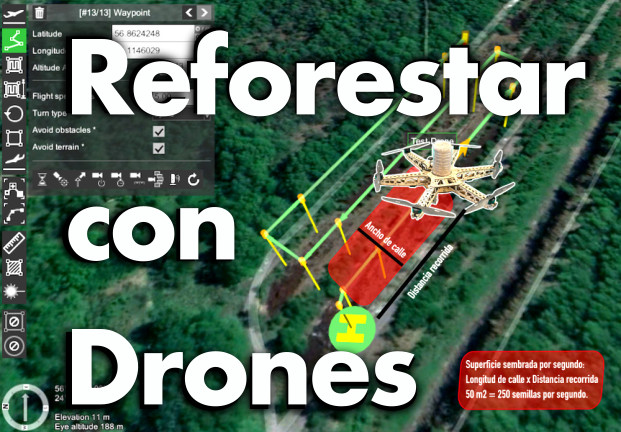
Paso3: Siembra con drones
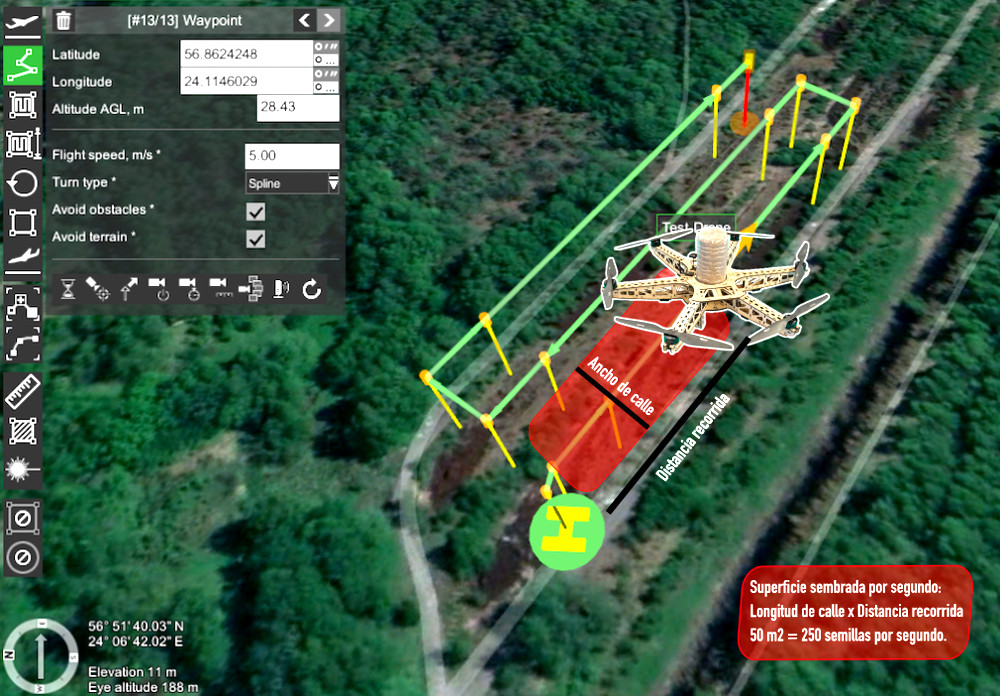
Una vez hayamos construido estos polígonos donde sembrar, para realizar un rellenado completo de la superficie con semillas, deberíamos conocer el ancho de siembra que puede abrir el drone sembrador, y la altura de vuelo establecida, para realizar un recorrido completo del territorio con una separación entre calles de este ancho conocido. La velocidad determinará también el número de semillas por metro cuadrado, aunque intentaremos maximizar la velocidad, para minimizar el tiempo de vuelo y realizar la operación de siembra por hectárea en el mínimo tiempo posible. Suponiendo que volemos a 20 km/hora esto sería unos 5 metros por segundo, si tenemos un ancho de calle de 10 metros, en un segundo cubriría una superficie de 50 metros, por lo que deberíamos lanzar 250 semillas por segundo para cubrir el objetivo planteado de 5 semillas por metro cuadrado.
Hasta aquí esta introducción, si sabes de inteligencia artificial y quieres ayudarnos, estamos buscando estudiantes o ingenieros que quieran colaborar en el desarrollo de este software. Ponte en contacto con nosotros si tienes ideas o puedes aportar algo. ¡Gracias!




_and_Digital_Terrain_Models_(DTM)_when_talking_about_Digital_Elevation_models_(DEM).svg){kind=link}
En primer lugar daros la enhorabuena por este ambicioso y transformador proyecto y mucha suerte en el futuro. Seguidamente y sin ánimo de preguntar información confidencial tengo curiosidad por saber si tenéis plan de desarrollar algoritmos IA para analizar las condiciones del terreno y elegir los micro sitios óptimos para plantar las semillas. También me gustaría saber si además de cámaras RGB utilizáis algún otro tipo de sensor como IR, multiespectral o LIDAR.
Hola Rubén,
Todo lo desarrollamos en código abierto, no hay nada confidencial.
Como hacer nos gustaría hacer muchas cosas y posibilidades hay muchas, pero ahora mismo son muchos frentes y pocas personas, así que estamos centrados en hacer germinar las semillas, está en nuestros planes desarrollar esta identificación, sí.
Sería mucho mejor usar LIDAR obviamente pero por los costes usamos el 3D de cámaras RGB convencionales, en cualquier caso detectar/predecir estos lugares es una tarea bastante compleja y también hay pocos datos para alimentar un motor de IA.